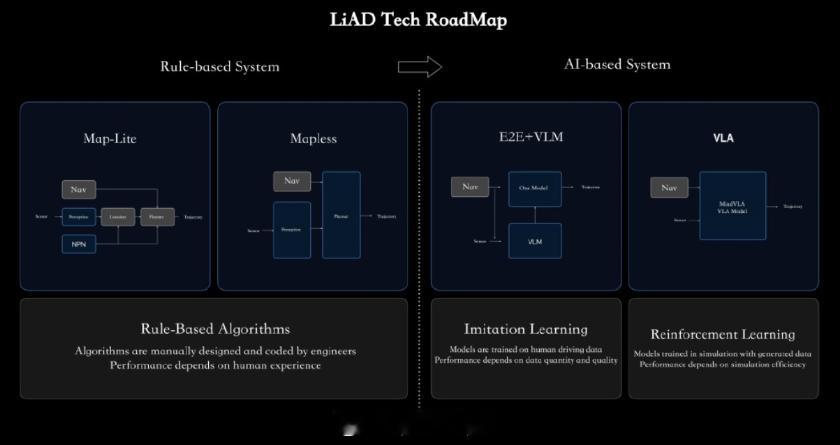
理想汽车自动驾驶高级算法专家詹锟近日在ICCV 2025大会上表示,自动驾驶技术的演进正从数据闭环迈向训练闭环,而世界模型已成为这一转变的核心引擎。
🔄 从数据闭环到训练闭环
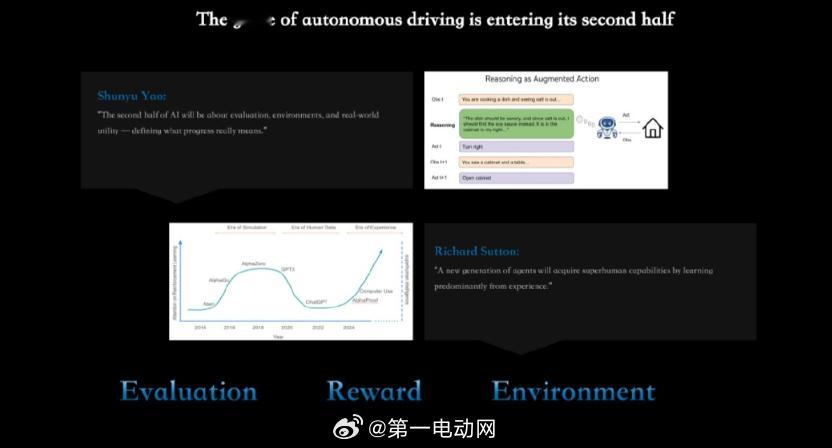
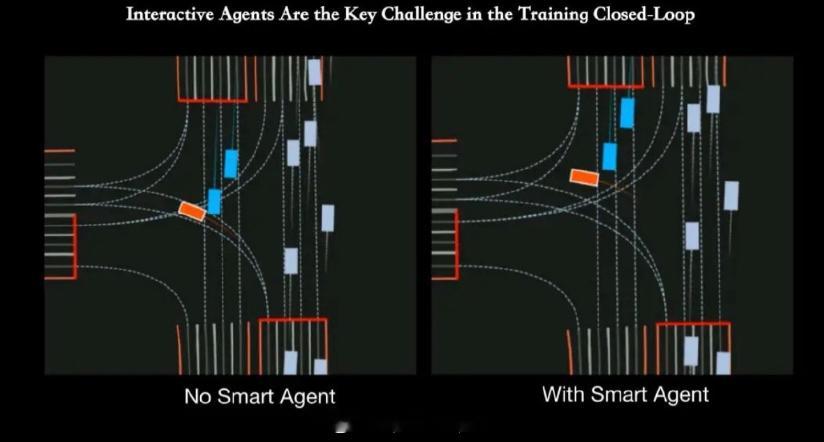
在训练闭环阶段,核心在于实现训练目标,而不仅仅是收集数据。
理想汽车发现,真实数据采集在稀疏场景下存在局限,难以覆盖足够的场景分布。训练闭环通过在既定训练目标下,让模型通过环境生成与反馈不断迭代,直至达成目标。
世界模型的三大应用
詹锟指出,世界模型主要支撑三大应用场景:
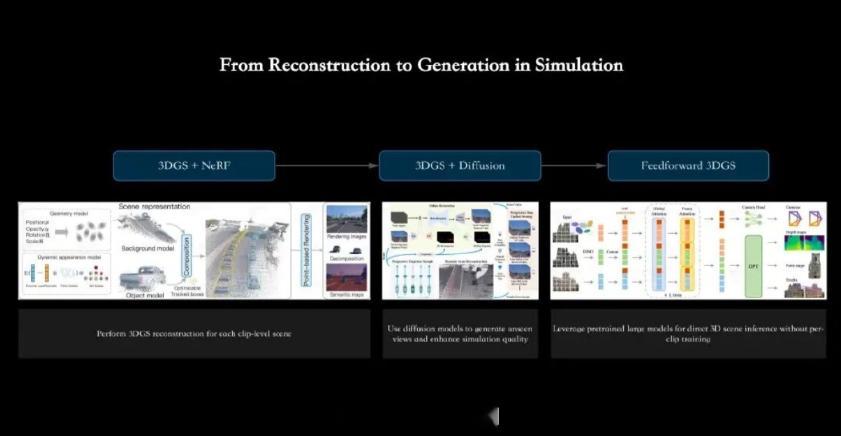
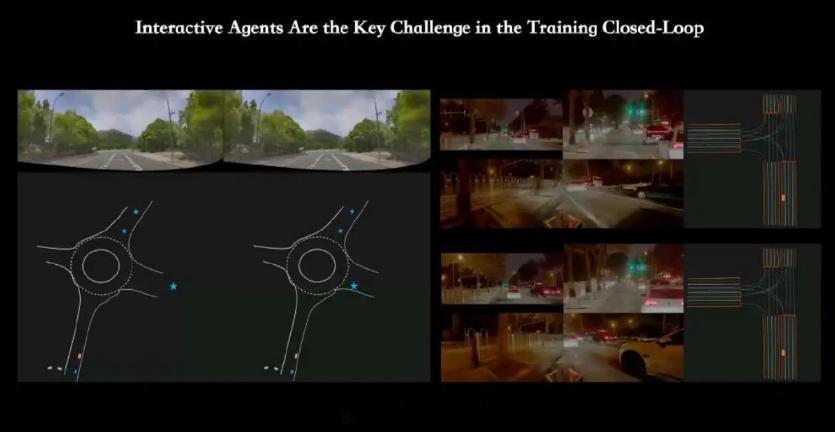
一是构建仿真系统,使车端模型能够进行长时序的仿真评测;
二是合成全新数据,丰富场景多样性;
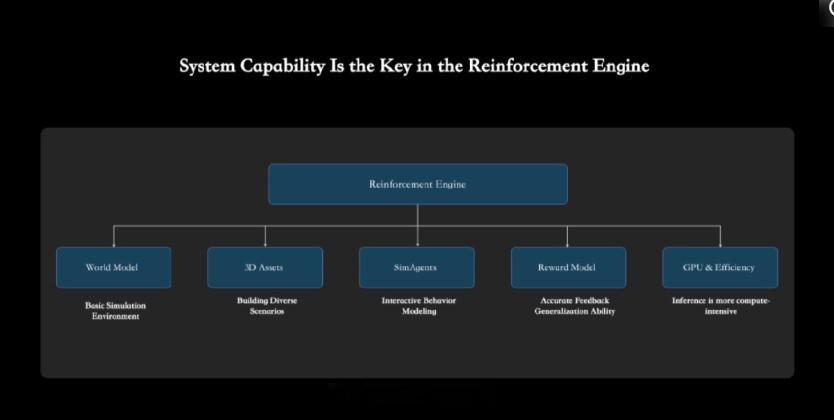
三是作为强化学习的世界引擎,让模型在其中自由探索并获得反馈。
理想的技术布局
理想已在今年8月推出VLA司机大模型,采用融合强化学习与训练闭环体系的全新架构。
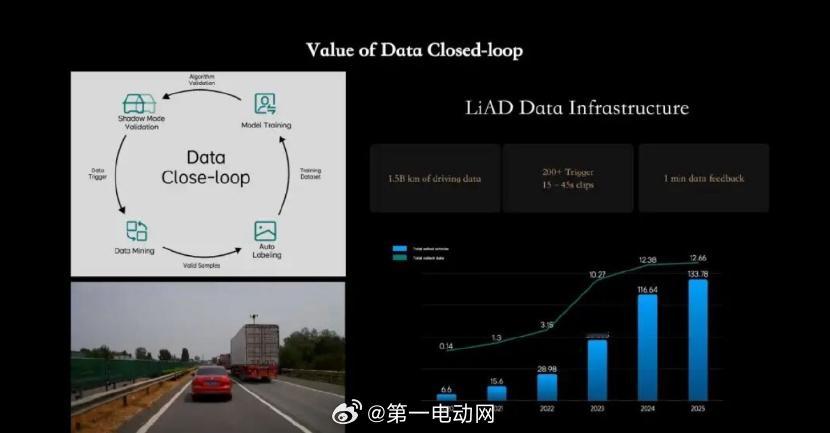
为支持这一系统,理想自2019年起已累计收集近15亿公里真实行驶数据,并建立覆盖200多个触发条件的数据回传机制,实现车端问题上报1分钟内云端获取完整数据。
简单理解世界模型
用通俗的话来说,世界模型就像是自动驾驶系统的“想象力沙盘”。
它不仅能模拟各种复杂驾驶场景,还能预测未来可能发生的状况——比如当一个球滚到路中间时,世界模型会思考“后面会不会有小孩冲出来?”而不仅仅是简单刹车。
这种能力让自动驾驶系统能应对更多罕见场景,实现更安全的驾驶决策
理想VLA自动驾驶智能驾驶