日本SLIM探月智能着陆器实施登月行动后的结果这几天一直是扑朔迷离,这台着陆器在实现约2小时的通信后被迫断电关机,原因是太阳能电池板无法发电,蓄电池电量持续降低,这几天大家都在猜测这台着陆器的命运,根据遥测数据推定它可能是以倒栽葱式的姿态着陆月面。
终于,在SLIM登陆月面后的第6天,日本JAXA公布了月面实拍图像,以及一系列工程成果。
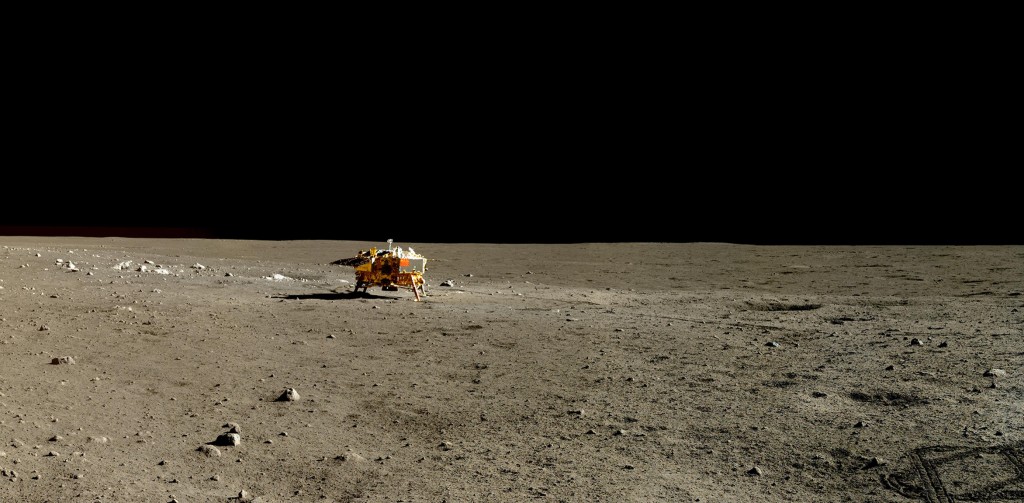
首先是实锤SLIM以倒栽葱式姿态着陆月面,照片是由主着陆器释放的LEV-2可变形月球机器人拍摄。

LEV-2拍摄的SLIM探月智能着陆器
根据实拍图像显示,阴影区正好位于太阳能电池板一侧,也就是说此时无法接收光照,无法发电,他们在等待太阳照射方向的转移,随着时间的推移,太阳能电池板会逐渐接收到光照,而且光照量也会越来越大,这就存在着陆器重新恢复发电的可能,而且着陆器在断电关机前为蓄电池留存了12%的电量,避免了过放电问题。
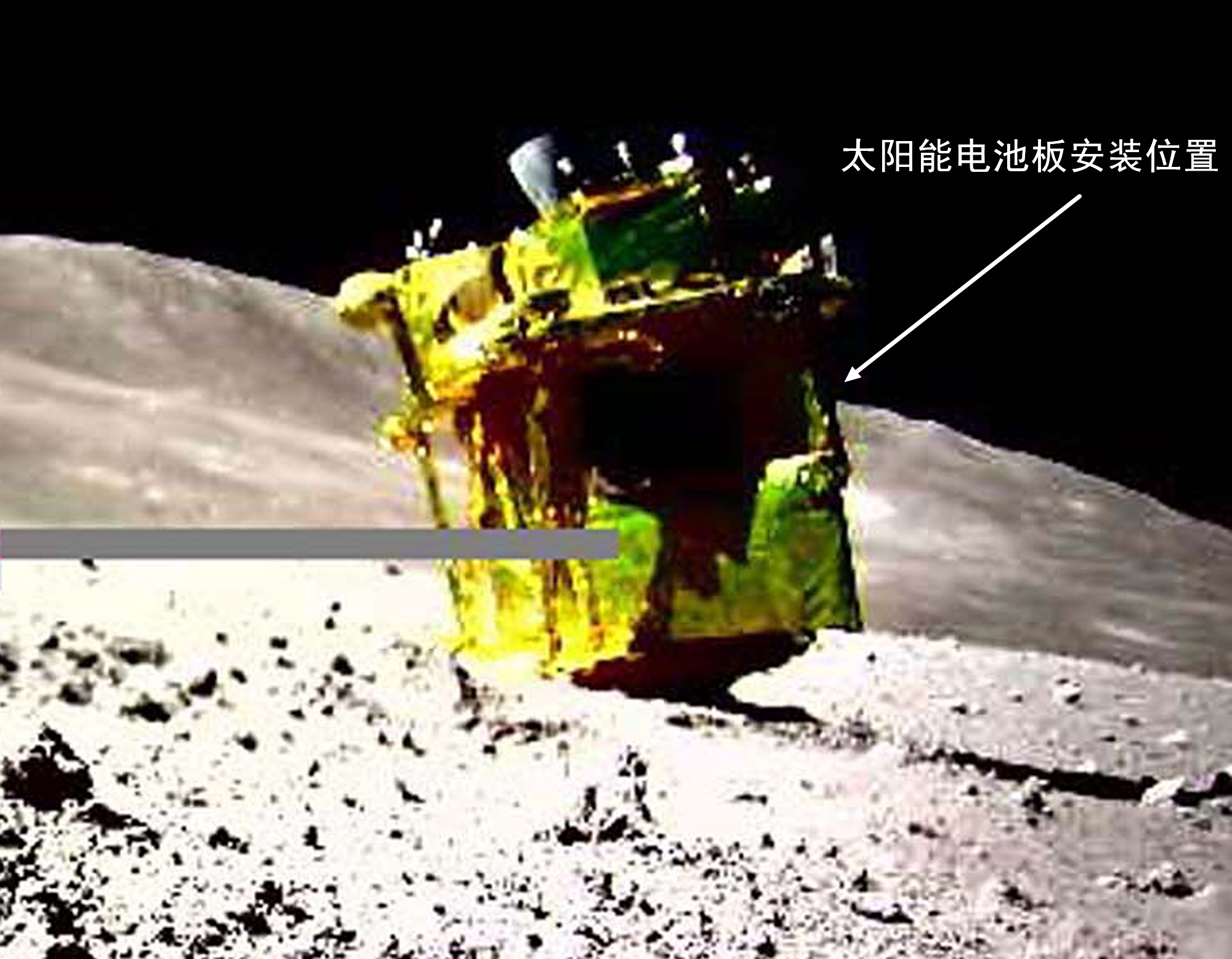
太阳能电池板安装位置
虽然是倒栽葱式着陆,但SLIM并没有完全摔坏,不仅可以与地球通信,而且着陆器配置的导航相机与多光谱相机也实现了开机运行,成功获取了月面图像。
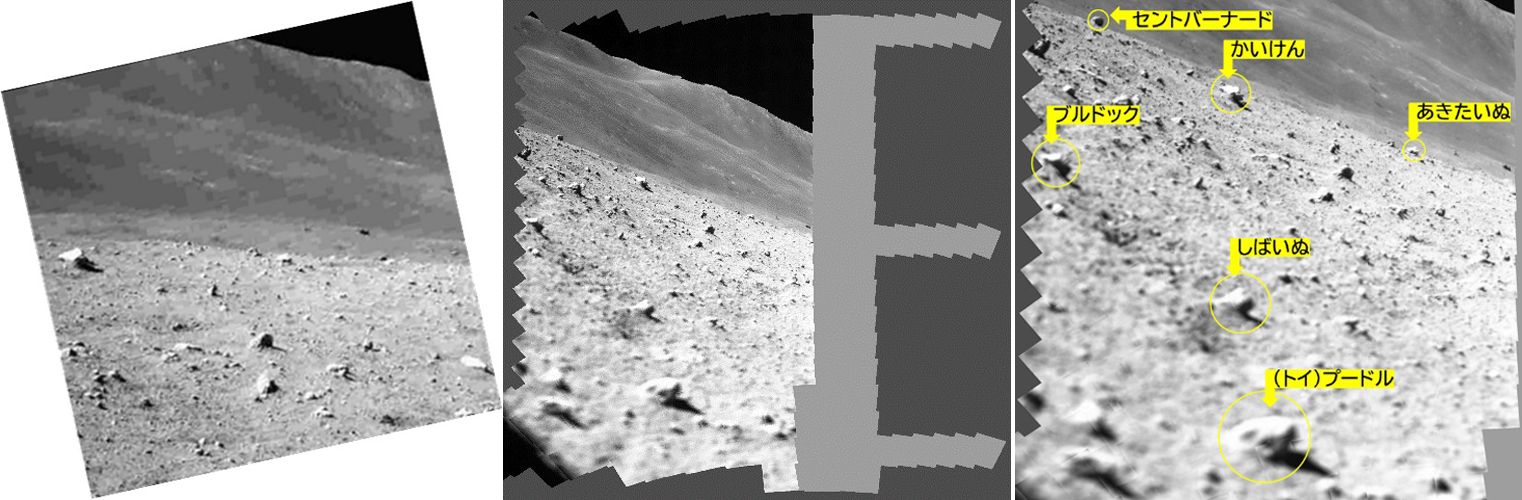
左侧是导航相机拍摄的月面图,中间和右侧图是多光谱相机拍摄的月面图。
就这点来看,SLIM的月面着陆标准已经高于半个世纪前苏联的火星三号探测器,后者在着陆火星表面后仅实现了14.5秒的数据传输,连一张图都没有,但人们仍将其视为一次成功的火星表面软着陆任务。
LEV-2拍摄的着陆器图像其实已经证明刷新了两项世界纪录,首先是LEV-2本身,在部署展开之前它是一个球形装置,外观看上去很像是日本动漫神奇宝贝中的精灵球,由主着陆器在接触月面之前释放至月面部署,到达月面后展开,利用两侧的半球体作为车轮进行移动,而且是自主移动。

LEV-2可变形月球机器人

LEV-2地面展开行驶测试
能够对准着陆器成像,已经证明LEV-2实现了月面行驶移动,而这台可变形月球机器人的重量仅有0.25公斤,因此它成为了人类有史以来部署月面最小的月球车,除了这项世界纪录,由此产生的还有一个世界纪录。
LEV-2由于自身重量极为有限,不具备与地球直接通信功能,所以它所拍摄的图像数据,是由另一台超小型月面移动探测机器人LEV-1进行接力中继传输,这是世界首次在月面实现多台机器人的自主联网通信。
LEV-1不同于LEV-2,前者是一台基于跳跃功能的月面移动探测装置,目前这台装置是否实现了月面跳跃行进功能尚不得而知,但它实现了跨越38万公里的地月直接通信功能。
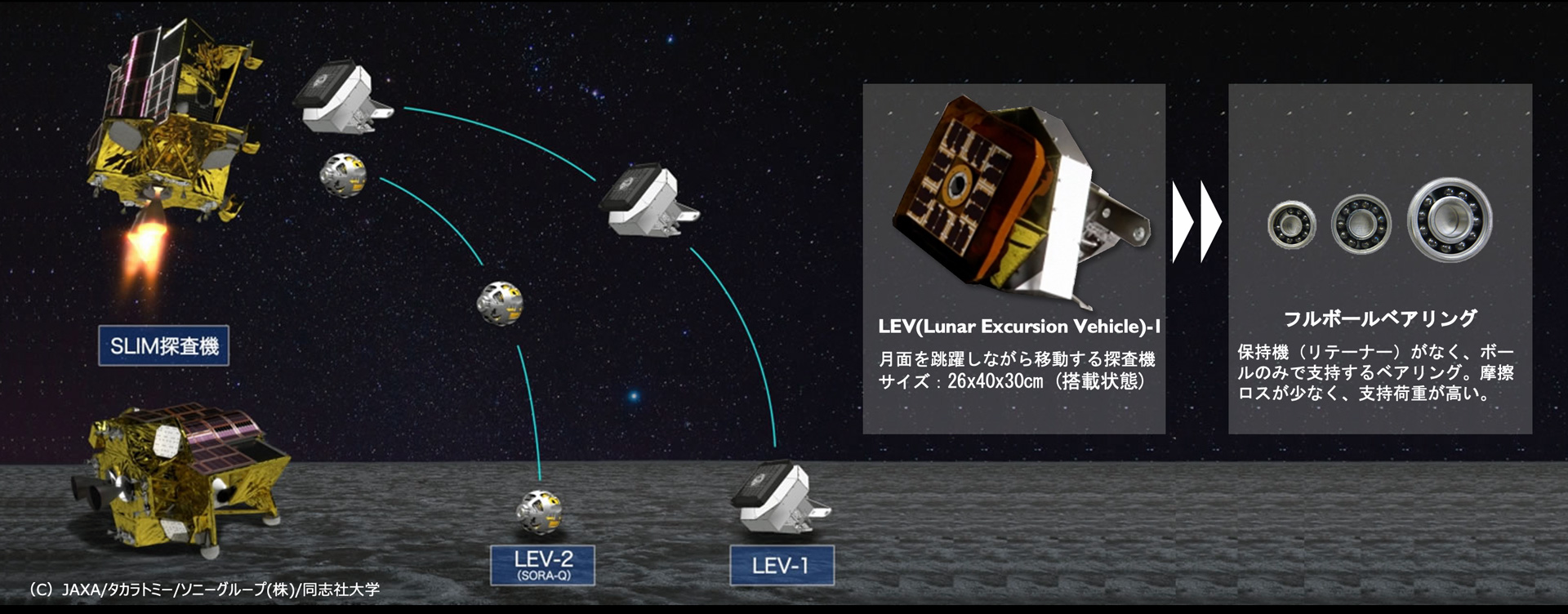
SLIM在着陆月面前分离LEV-1与LEV-2
LEV-2地面跳跃测试,它配置有独立的地月通信模块。

LEV-1与LEV-2可以在月面进行联网通信,图为CG图。
在此之前,比如我国的嫦娥四号着陆器与玉兔二号月球车,皆具备相互独立的通信功能,当然并不是说我们没有开发这项功能的能力,而是任务设计不同所致,我们的月球车是要驶向远方的,当然需要独立的通信功能。

萌萌的玉兔二号歪头照,这是在与鹊桥号中继星进行通信。
事实上,早在天问一号任务时期,我们就已经实现了在火星表面的多器联网数据传输功能,比如由分离相机拍摄的祝融号火星车与着陆平台的合影照片,就是由分离相机自主传输至祝融号火星车,再由火星车上传至环火轨道的环绕器,再回传地球。
的天问一号着巡合影照。" uploaded="1" data-infoed="1" data-format="jpeg" data-size="1746219" data-phash="D6AB1856ABA158DC" data-source="outsite" outid="undefined">

祝融号火星车释放的“分离相机”,可与祝融号进行火面联网通信。
接下来就要谈谈日本SLIM探月智能着陆器刷新的第三个世界纪录,这项纪录是此次登月的核心任务,也是最有价值的一个纪录,就是实现了100米以内偏差的着陆精度。
日本SLIM探月智能着陆器的实际着陆点与预设着陆点的偏差仅有55米,此为当前世界范围内最高登月位置精度。与之对比,嫦娥三号的位置偏差约600米,嫦娥四号的位置偏差是千米量级,嫦娥五号的位置偏差是2.33公里,印度月船三号的位置偏差约360米。
嫦娥五号之后的印度月船三号与日本SLIM的着陆点偏差数值大幅下降,基本实现了定点着陆功能,这是因为后两个着陆器都应用了基于图像匹配技术的地形相对导航功能。

印度月船三号着陆器
地形相对导航指的是,预先在着陆器内存储下降航迹下方的导航点月面图像,着陆器在下降过程中实拍月面图像,再将实拍月面图与存储月面图进行匹配对比,进而解算出瞄准预选着陆点的正确下降弹道,并控制反推发动机朝向预选着陆点飞行。

地形相对导航技术演示动画
JAXA公布了一张很有分析价值的图片,这张图是由印度月船二号轨道器相机拍摄的高分辨率月面图叠加日本SLIM拍摄的月面图拼合而成。

图中两个蓝色框是SLIM在50米高度悬停时拍摄用于识别月面障碍物的图像,图中的红框区域是SLIM选定的安全着陆区及安全着陆点,在进行最后一次障碍物识别时的位置偏差仅有约10米,这才是用于评估着陆精度的数据。
通过这张叠加图可以很直观地认识到一点,就是环月轨道遥感卫星拍摄的图片,并不足以识别所有障碍,印度月船二号轨道器搭载的高分相机的分辨率达到了0.3米,是目前人类部署环月轨道分辨率最高的高分相机,比NASA的LRO月球勘测轨道飞行器的LROC窄视角相机的0.5米分辨率还要高。

印度月船2号轨道器拍到的阿波罗12号登月遗迹
在最后下降过程中必然需要着陆器自主进行障碍识别,并进行机动飞行,所以必然与预选着陆点有偏差。
如果一切正常的情况下,日本SLIM其实可以有更高的着陆精度,也就是前面说的仅有约10米的位置偏差,为什么没有实现呢?
因为SLIM在距离月面约50米高度时推力突然骤降55%,这又是为什么呢?
SLIM拍摄的另一张图像给出了答案,这个答案看起来还颇为有趣,着陆器两台主发动机的其中一台的喷管掉落在了月面上,一台发动机完全失效,从实拍月面图上可以看到,除了主发动机喷管,还有一些其它零件,在太阳照射下形成了亮斑。


因此,即便SLIM选择了位置偏差最小的安全着陆点,但由于大幅丧失推力,导致不可避免的拉大了偏差。
不过值得一提的是,虽然失去了一台主发动机,但着陆器的飞控系统是正常的,在仅有一台主发动机的情况下,姿控发动机保持了着陆器的垂直下降姿态,而且控制着仅剩的一台主发动机实现了1.4米/秒的接地速度,完全在软着陆设计值范围内,而且还实现了避障机动飞行。
SLIM着陆缓冲设计比较特殊,需要着陆器在距离月面约3米时以倾倒姿态着陆,便于布置在着陆器侧面的着陆缓冲机构吸收最后的着陆冲击能量,也正因为一台发动机失效,导致在进行倾倒动作时侧向速度过大,最终以倒栽葱式的非正常姿态着陆。


SLIM就败在了这最后一摔
不得不说,还得是有图才有真相,此前笔者以为是着陆缓冲机构没有正常发挥,以及月面超预期的复杂地形,才导致SLIM的非正常姿态着陆,但实际上主要是因为一台主发动机故障。
现在基本可以给SLIM的着陆成绩打分了,JAXA为此次登月任务给出了三个层次的成功定义:
最小成功:实现月面软着陆,基于机器视觉导航的自主避障技术得到验证;
全部成功:不仅实现月面软着陆,而且实现了基于图像匹配导航的高精度着陆,着陆位置偏差控制在100米以内;
超额成功:在实现高精度着陆的基础上,探测器搭载的科学探测载荷成功运行一个月昼。
就实际表现来看,月面软着陆目标是部分实现,基于图像匹配导航的高精度着陆任务实现,位置偏差成功控制在100米以内,但未能实现着陆月面后工作一个月昼的目标,满分100分的话,实际表现也就是60分,可以及格。

SLIM的着陆缓冲装置未能发挥作用(红圈)

SLIM着陆缓冲装置测试影像
日本SLIM的登月任务表现证明了什么是“基础不牢,地动山摇。”。首先SLIM配置的2台500N发动机变推力能力有限,通过登月直播画面可知,SLIM的下降速度控制主要是通过500N发动机以类似姿控发动机的脉冲功能实现,即在开机动作与关机动作之间的快速交替,有点像车辆以高速状态行驶过程中的“点刹”动作。

SLIM探月智能着陆器的500N主发动机
也就是这种快速的开机与关机动作,直接导致了主发动机的可靠性先天不足。
与之对比,助力我国嫦娥系列着陆器三次登月三次成功的地外天体着陆用金牌动力7500N变推力发动机,不仅最大推力是日本SLIM主发动机的15倍,还能实现16%至110%推力变化,不仅能够满足月球登陆任务,稍加改动也胜任火星登陆任务,天问一号成功登陆火星已经给出证明。

7500N变推力发动机

嫦娥四号的7500N变推力发动机


月球版7500N变推力发动机(左)与火星版7500N变推力发动机(右)
没有关键技术的突破,就不能收获更长远的效益,日本SLIM探月智能着陆器连一个月昼的工作时间都不能达成,完全没有过月夜能力。
与之对比,嫦娥三号着陆器运行十年之久还有科学载荷可以工作,嫦娥四号着陆器与月球车运行至今也已有五年,玉兔二号已经成为人类部署月面正常开展移动探测时间最长的月球车,收获了大量的科学探测数据,接下来嫦娥七号的设计寿命就能达到8至10年,实际寿命则更长。
嫦娥系列着陆器是首创基于机器视觉导航的自主避障技术,尤其是激光三维成像敏感器这项核心技术,不论是日本的SLIM还是印度的月船三号都在模仿此项技术。

嫦娥系列着陆器对月面激光三维成像障碍识别效果图

嫦娥三号月空悬停
日本、印度引以为傲的高精度着陆技术对于我们而言只是选择何时去做的问题,早在嫦娥四号任务时期,我们就已经考虑过这项技术。
当时有专家建议,嫦娥四号以高精度着陆的方式降落在嫦娥三号旁边,可以向世界展示我们的着陆精度控制能力,但是经过权衡,专家团队认为,嫦娥三号着陆区域已经进行过探测,再让嫦娥四号去重复探测,科学价值不高,最终我们选择了人类从未实现月面探测的月球背面。基于任务需求,我们将高精度着陆任务留给了嫦娥七号。
七八年前我们就有条件实现高精度的“定点着陆”,图为玉兔号月球车拍摄的嫦娥三号着陆器。
嫦娥七号一出世就将挑战最高难度的月球南极着陆任务,它不仅仅是验证100米以内的高精度着陆技术,而是首次使用此项技术就是“实战”,因为月球极区的太阳高度角极低,月面的光照区与阴影区连续交替变化,如果不能在正确的时间高精度着陆光照区,就意味着任务的失败,不像日本SLIM与印度月船三号的技术验证性质,即便不能实现高精度着陆,只要实现软着陆也可成功,这就是为什么说嫦娥七号首次应用高精度着陆技术就是“实战”。


月球南极及嫦娥七号的预选着陆点
之所以敢于这样去做,是因为我们的技术基础足够扎实,比如嫦娥系列着陆器的基于机器视觉导航的一系列控制产品更便于移植基于地形相对导航的高精度着陆控制设备,金牌动力7500N变推力发动机届时也会更加成熟可靠,在实施登月前,嫦娥七号轨道器还有自己的高分辨率相机进行实时拍摄,这就是“工欲善其事必先利其器”。
失败就是失败,偏要说什么60分90分,继续捧,反正逢霉日欧必捧,逢中俄朝印必贬,犹太基金发的狗粮不会拉肚子
三项记录?最快丢垃圾?最小的人造垃圾?还有一个会是什么
让你们登月,你们却向月球扔垃圾,素质何在
日吹狗开始工作了,好恶心啊,
还不如屙三,屙三好歹成功99%,小日子只成功了98%。
好莱坞60年前都能制作登月,宝莱坞现在更不在话下!要啥图片视频都满足你。
自从印度宝莱坞成功拍摄登月视频后,日本也成功实现了突破…[得瑟]日本那二十年如一日制造假恐龙化石的教授会不会后悔自己选错了“研究”方向?![得瑟]如果造一点“研究”登月,是不是到现在还是“成功”的。[得瑟]毕竟埋恐龙化石必须在野外,太容易被抓到。[得瑟]拍“登月”在摄影棚就可以,多安全呀?![笑着哭]
可惜了,这号又费了,太明显了,真可怕不知道还有多少隐藏
日本登月计划创造了一个世界第一,所有的照片你都必须把头偏转45度来看[笑着哭]。
以前有人吹嘘,日本小行星取土胜过中国月球取土,现在不说话了
大国在准备建造月球基地,小国还在玩登录小游戏,那是那种迷你型的[笑着哭]
失败是成功之母!希望他们能多多失败。[呲牙笑][呲牙笑][呲牙笑]
大家发现没有印度卫星和lro星拍的阿波罗12号插的旗杆还立着,光照角度的不同印度星拍的是个长条状阴影,lro星是个黑点。对此证据我想知道那些说载人登月好莱坞拍的有什么新说法[呲牙笑]
还有一个世界记录:头朝下降落,特么真牛[点赞]
虽然没坠毁但确实是坠落了[笑着哭]有图有真相!以这样的姿势硬着陆,都能说是成功登月的也真没谁了
二流国家,恶心。
没有登陆成功其余都是扯淡,枪再好没办法发射子弹,那你说的是个锤子?
这看起来也是哈日派哦
上去就撅着,鬼子算是废了
脸真厚,直接砸上去了都没有开花
小孩玩的玩具
有办法扶正吗
确实挺先进的,可能有一天你会把美国灭了
小日本磨刀霍霍准备迊敌!
奇葩的着陆方式,奇葩的月球车。很日本[doge]
在目前技术条件下,所谓高精度着陆,除了浪费燃料或增加无用载荷外,还有什么用?
都怪清华,技术没给全
月船3号是360米吗?不是与月球南极偏100多公里?
[吐舌头咯]梗着脖子。日本航天世界前列(确实不假[得瑟]有能力搞航天的就那几家)
恐怕没什么人或政府机构愿意以这种方式刷记录
鬼子还是事实求是公布,阿三快落月就切换画面什么都不知道
日本:没错啊,发射时是头朝上的,怎么去了月球头朝下了? 阿三:呆瓜,到了月球要掉头,那里是引力朝着月面的,上次俺也是这样的
和印度的区别在于,他们合成了一张照片
很详细,作者不错!喷子太多了,别理会。
为什么老美能登火星车,月球却难?
精彩感谢您的分享,我们的嫦娥还是最好的
科学好文,都了解了,嫦娥成功背后的必然
印度把成功的门槛拉低。
光阴似箭,日月如梭。日本SLIM探月智能着陆器实施登月行动后的结果一直扑朔迷离,令人关注。
杀日本鬼子
这样也能吹?要是中国搞成这样,不知道被喷成什么样子![笑着哭]都没有看见这些人吹中国着陆器没有任何问题的登陆月球是什么记录
汉奸传给倭国的资料不全。