
无人机目前随处可见,应用广泛。但是无人机的续航一直是一个困扰其广泛应用的一个问题。如果有这么一种无人机可以根据需要直接通过电缆线线充电,那么无人机续航问题则可以完美解决。在任务途中,电不足了无需返航,在附近找根电线去充(偷)点电不就好了。目前这种实验性新型四轴飞行器已经被研发成功,借助其独特的充电(偷电)技术,该机可以无限期地保持在空中。
这项充电技术由南丹麦大学的科学家开发,适用于用于执行各种任务的无人机。比如沿着输电线路进行电力路线的自动巡查,其他用例正在无限的挖掘中。

这架无人机使用商用的Tarot 650 Sport碳纤维无人机框架改造而成,对其添加了电动四轴飞行器推进系统、7000毫安时锂聚合物电池以及树莓派Raspberry Pi 4B Mini机、Pixhawk V6X自动驾驶仪等电子组件模块,以及毫米波雷达单元和RGB摄像机。

最创意的改造是在无人机顶部安装了一个被动驱动的电源线夹具。该设备位于电缆导管内,电缆导管由两个广泛分布的向内倾斜臂组成。
当无人机的机载软件检测到电池电量不足时,飞机会使用摄像头和雷达来发现最近的输电线。然后飞机从下方直线向上飞向那条线,靠近输电线后,无人机的电缆导管将电线引导至夹具中,倒挂在电线上,并向下推动横跨夹具两个橡胶侧之间的开放空间的两条弹性带,这个操作这使这些侧面在电线上方快速靠近在一起,而无需借助电力驱动。一旦倒挂到电线上,磁力控制电路就会启动,为夹具提供动力,当无人机悬挂在绳子下方时,使其牢固地围绕绳子闭合。然后,无人机顶部的感应充电器开始从电源线吸取电流。

一旦无人机的电池充满电,夹具就会打开,无人机就可以恢复其巡线任务。另外,如果电线电压足够,则作为控制电路的电源,否则使用无人机的电池。
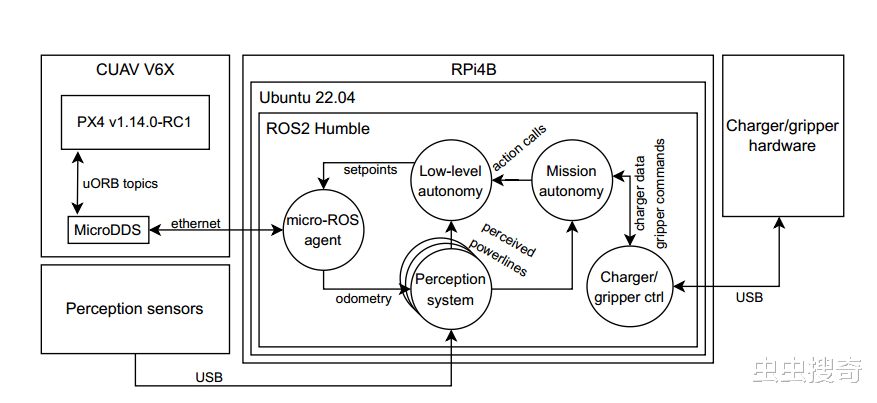
其控制系统则有树莓派中的Ubuntu 22.04操作系统控制和管理,其控制系统软件架构如下:
在丹麦HCA机场的电力线路上进行的现场测试中,这架重4.3公斤的演示无人机能够运行两个多小时,并在线路检查期间为电池充电五次。科学家们现在正在努力提高该系统的稳健性,并希望在更偏远的地点和恶劣的天气条件下对其进行测试。
有关该研究的论文发表于2024年IEEE国际机器人与自动化会议,大家可以去下载学习,及时引进,以后就可以不用愁无人机没钱充电了(#^_^#)。

真正实现 无 人 机 了[得瑟]