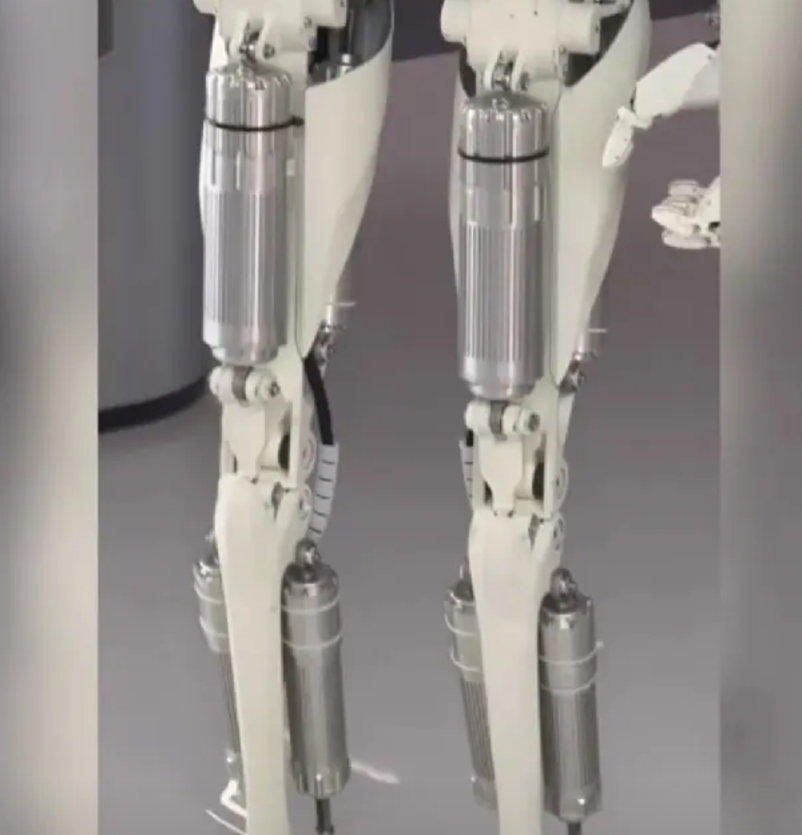
小鹏机器人的这种动力结构设计,是很平庸稳妥的一种方案。尤其腿部使用推杆电机,优点是稳定输出,缺点是没有爆发力,注定了没有办法进行剧烈运动(弹跳、高速奔跑)。硬件这个事情,动力结构不同,结果就不一样,不是死磕就能解决的。如果想提升动力和爆发力,就要改变结构设计,推倒重来。



小鹏机器人的这种动力结构设计,是很平庸稳妥的一种方案。尤其腿部使用推杆电机,优点是稳定输出,缺点是没有爆发力,注定了没有办法进行剧烈运动(弹跳、高速奔跑)。硬件这个事情,动力结构不同,结果就不一样,不是死磕就能解决的。如果想提升动力和爆发力,就要改变结构设计,推倒重来。
作者最新文章
热门分类
科技TOP
科技最新文章