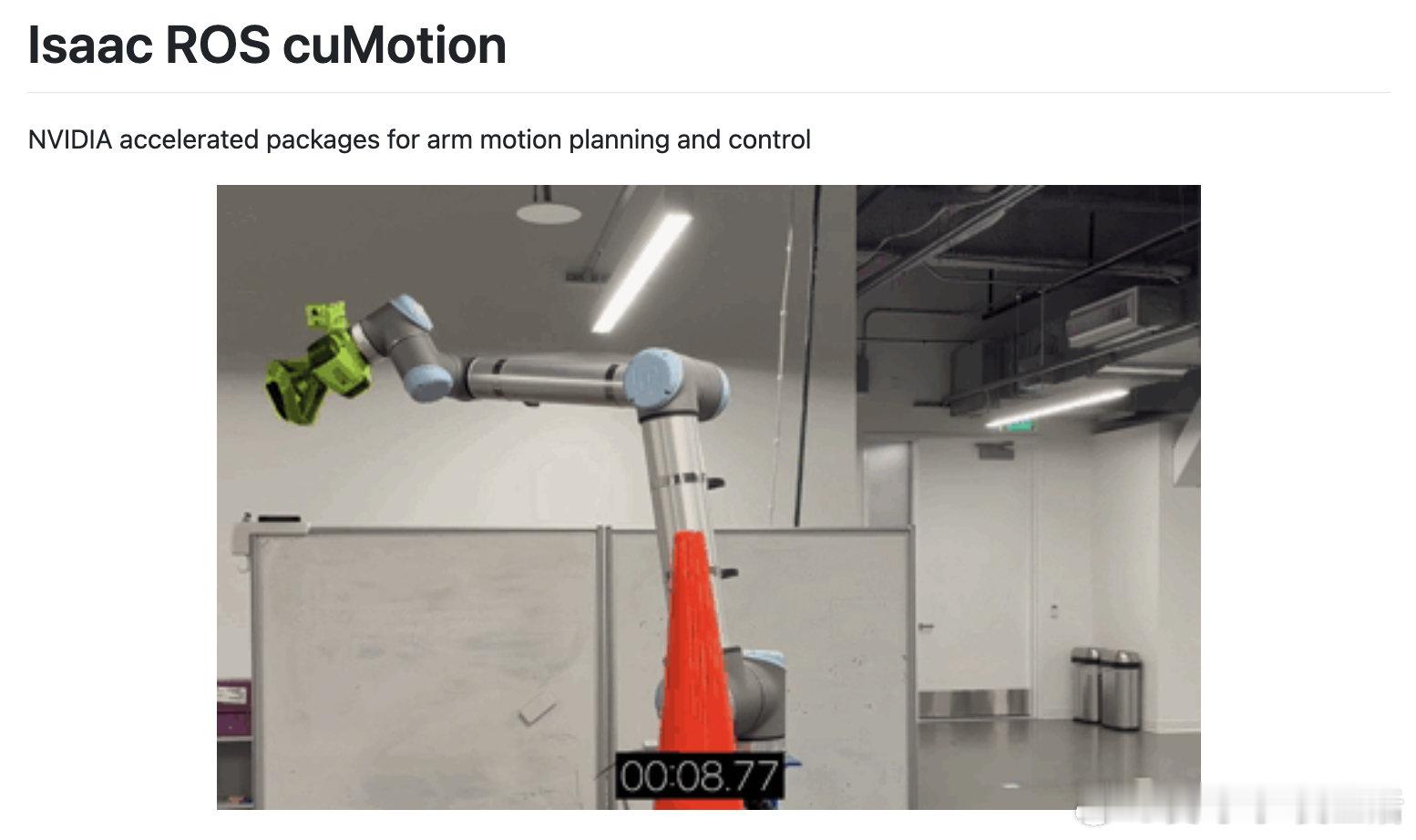
NVIDIA Isaac ROS cuMotion:专为 ROS 2 机器人臂运动规划与控制打造的 CUDA 加速软件包,提升机械臂操作效率与环境感知能力。
• 高效运动规划:利用 CUDA 加速,生成平滑且时间最优的避障轨迹,显著缩短规划周期,复杂环境下依然能找到有效路径。
• 深度摄像头环境重建:结合 nvblox 实现基于深度流的三维环境重建,自动分割机器人自身,精准识别障碍物,提升避障准确性。
• 灵活集成:模块化设计,完美兼容 MoveIt 2 和 ROS 2 Humble,支持虚拟仿真(Isaac Sim)与物理机器人无缝切换。
• 多模式示例支持:独立 MoveIt 规划、Isaac Sim 仿真机器人及真实机器人部署,方便开发调试和快速迭代。
• 安全优先:强调操作安全规范,建议熟悉紧急停止设备和周边环境,保障运行安全。
• 持续更新:2024年12月新增目标跟随与抓取放置流程,功能日益完善,适应更复杂任务需求。
cuMotion 不仅提升了机械臂运动规划的速度和精度,更通过环境重建和自身分割技术,解决了动态复杂环境中的感知与规划难题,体现了软硬件协同加速的本质价值。
了解详情🔗 github.com/NVIDIA-ISAAC-ROS/isaac_ros_cumotion
机器人 ROS2 运动规划 深度学习 CUDA加速 自动化 智能制造