英文题目:Hysteresis-assisted shape morphing for soft continuum robots
中文题目: 迟滞辅助的软体连续体机器人形状变化
作者:Zheyuan Bi, Tianchen Ji, Sanja Dogramadzi, Soo Jay Louis Phee, Jiajun Liu, Wenjie Lai, Diyang Wu, Bing Zhang, Lin Cao
作者单位: 南丹麦大学、新加坡南洋理工大学、上海交通大学
期刊:Science Advances
发表时间:2025年10月15日
链接:https://www.science.org/doi/10.1126/sciadv.adx3024
引文格式:Bi Z, Ji T, Dogramadzi S, et al. Hysteresis-assisted shape morphing for soft continuum robots[J]. Science Advances, 2025, 11: eadx3024.
01 全文速览传统机器人要做得更灵活,就得加更多电机。这条思路在软体机器人这里碰了壁——结构本来就软,再加一堆驱动器,又笨重又难控制。有没有可能用很少的驱动器,却让机器人产生很多种不同的形状?
这篇论文的答案是:有。而且办法很反直觉——他们故意利用“迟滞”这个通常被避之不及的现象。
所谓迟滞,简单说就是机器人“加载”时的形状和“卸载”时的形状不一样。他们设计了一个倒Z字形的腱鞘机构,让两根腱穿过一系列弯曲的鞘段,利用摩擦让拉力从尖端向基部逐段衰减。这样一来,拉动腱的时候,弯曲是从尖端开始、一节一节往基部发展的;释放的时候,也是从尖端开始一节一节恢复。
这个机制的巧妙之处在于:通过切换两根腱的拉动和释放顺序,只用两个电机就能让一个n段机器人产生3ⁿ种不同的形状。3段机器人就有27种,6段就有729种,20段就是3.4亿种。
他们把这个机制集成到了一种特殊的生长型机器人中,让它能在复杂环境中生长、转向、缩短,甚至像“跟随领头者”一样在障碍物中穿行。
核心亮点:
✅ 迟滞变废为宝:把通常被讨厌的迟滞现象变成形状控制的工具
✅ 指数级形状扩展:两个电机驱动n段,产生3ⁿ种形状,远超传统设计
✅ 顺序弯曲机制:拉力从尖端向基部衰减,弯曲/恢复都是从尖端开始,可控可预测
✅ 生长+形状变化:能生长、能转向、能缩短、能锁定形状,适合在狭小空间作业
✅ 理论完整:力学模型、运动学模型、仿真与实验吻合良好
02 研究内容🧩 核心概念:把迟滞变成功能
传统机器人设计里,迟滞通常被当作问题来处理——它会导致位置不准、控制困难,需要花大力气补偿。但作者的思路是:既然迟滞客观存在,不如干脆利用它。
他们设计了一个倒Z字形腱鞘机构:把一段段弯曲的鞘段(像弯管)串联固定在机器人内壁上,每段之间留一个间隙。腱从基部穿过所有鞘段到达尖端,然后折返回基部。每个鞘段有一个特征角度θ,决定了这段的弯曲程度。
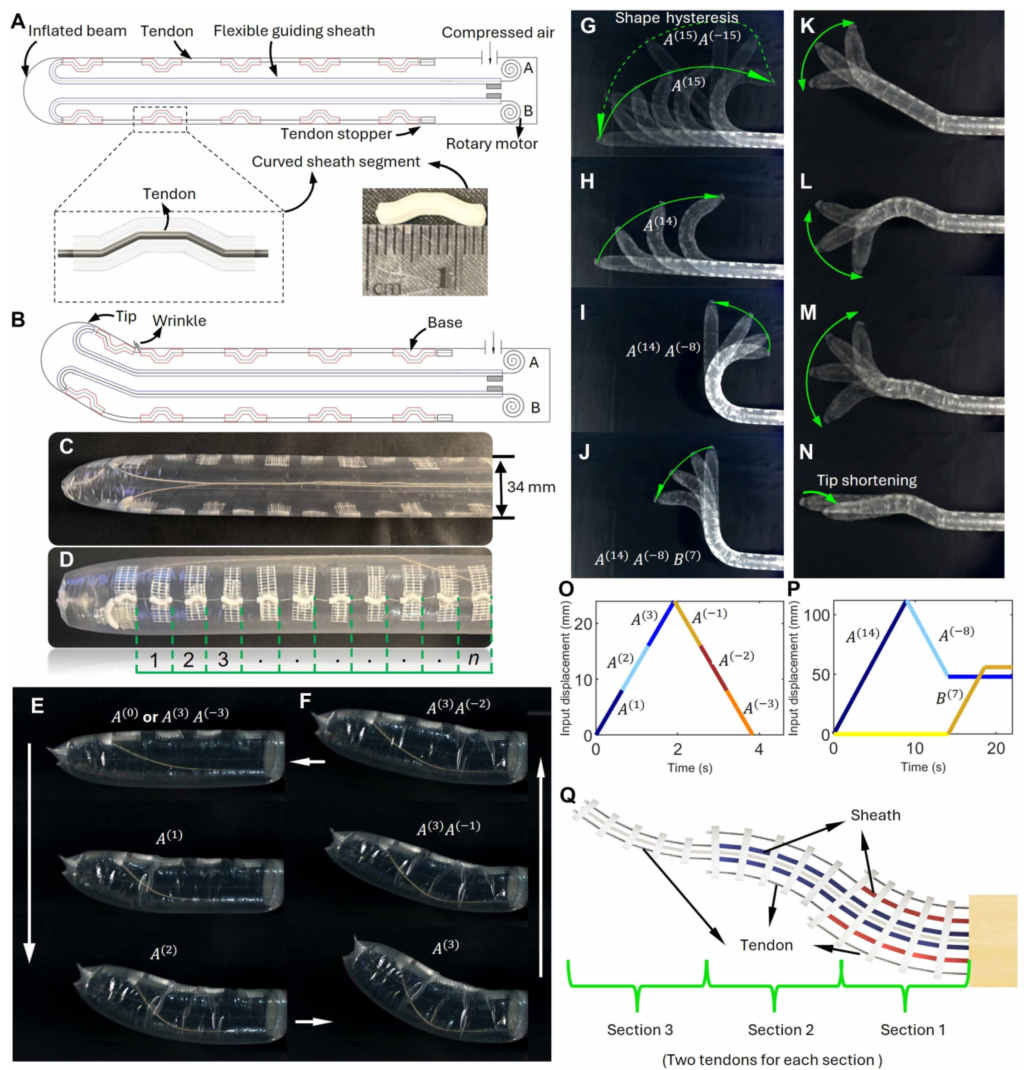
Figure 1:工作原理和原型。(A)由倒置之字形TSM驱动的充气连续梁具有沿着其内壁间隔地串联连接的弯曲鞘段。每个肌腱从电机通过引导鞘到尖端,然后通过弯曲鞘段倒置到基部。(B)电机拉动肌腱,导致充气梁从尖端到基部顺序弯曲,一段一段地。(C和D)机器人原型。(E)从尖端到基部顺序弯曲,间隙一个接一个地闭合(见影片S1)。(F)从尖端到基部的顺序伸直,间隙一个接一个地打开。(G)在加载和卸载阶段期间的不同路径,用于运动的输入命令被定义为A(n)和B(n),其中正n表示从尖端闭合n个段(肌腱拉力)和负n意味着打开它们(肌腱释放)。(H到J)机器人通过两个电机的顺序驱动转变为S形。(K到M)机器人可以在尖端转向而其余身体不受影响的情况。(N)拉动两个肌腱使机器人从尖端缩短,用于姿势调整。(G)~(N)的动作请参照影片S2。(O)与(E)、(F)的情况对应的输入位移。(P)输入位移对应于(I)和(J)中的情况(模拟)。(Q)由六个腱驱动的传统三节连续体机器人,每个节由两个腱独立驱动。更灵活的需要更多的致动器,增加了系统的复杂性。
图1A展示了结构原理,图1C-D是实物原型。关键设计点:
弯曲的鞘段会产生摩擦,让腱的拉力从尖端向基部逐段衰减
每段之间的间隙决定弯曲角度(完全闭合时约90°)
拉动一根腱时,弯曲从尖端开始,一节一节向基部发展(图1E)
释放腱时,恢复也是从尖端开始,一节一节向基部发展(图1F)
加载和卸载路径不同,这就是形状迟滞(图1G)
Movie S1:顺序弯曲和顺序恢复过程
视频展示了机器人从尖端开始、一节一节向基部弯曲的完整过程,以及释放时同样从尖端开始、一节一节恢复的过程。这直观地演示了“顺序弯曲”机制和形状迟滞现象。
📐 力学原理:为什么能顺序弯曲?
拉力从尖端向基部衰减,来源于鞘段对腱的摩擦。他们用Capstan方程来描述:
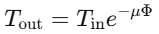
其中Φ是累积弧角。实验测得的摩擦系数μ≈0.045。当θ=25°时,刚好能让顺序弯曲发生——太小的θ(15°)会随机弯曲,太大(35°)则需要的力太大。
Figure 2:带弯曲鞘段的钢筋束的张力传递和摩擦分析。(A)钢筋束穿过具有特征角θ的弯曲鞘段。由于鞘段弯曲角引起的摩擦,钢筋束张力从Tin下降到Tout。(B)弯曲鞘段内钢筋束的剖视图。(C)采用两个测力传感器和一个线性驱动器,测量了不同数量或类型的弯曲鞘段在肌腱两端的张力。(D)特征角θ对机构张力分布的四个阶段影响。仅考虑一个弯曲护套段。(E)不同数量弯曲护套段(θ = 25°)的张力分布。(F)模拟和实验中张力分布的比较。(G)张力分布沿着多个护套段(输入张力,2 N).考虑过渡阶段的模型(公式2)显示了更好的准确性。均方根误差(RMSE)值量化了模拟和实验结果之间的差异。(H)牵拉过程中沿着多个弯曲鞘管节段的张力分布(输入张力增加):实验与模拟。这解释了为什么在拉动过程中弯曲从尖端顺序地传播到基部。(I)在释放过程中沿着多个弯曲鞘段的张力分布(输入张力减小):实验与模拟。这解释了为什么在释放过程中弯曲从尖端顺序传播到基部。
图2D显示不同θ下的力-位移曲线,图2E显示不同鞘段数量下的曲线。随着鞘段数增加,拉力衰减更明显,这正是实现顺序弯曲的关键。
他们进一步用了一个改进模型来捕捉“加载-释放过渡阶段”的迟滞特性:

图2F-H验证了这个模型的准确性。
Movie S5:直鞘段与弯鞘段的对比
视频展示了机器人驱动过程中,输入信号、腱张力、气压变化与机器人响应的对应关系。可以看到当拉力达到阈值时,机器人开始弯曲,张力随之下降,然后继续拉动,下一个节段开始弯曲。
🎮 运动学模型:如何预测形状?
他们把机器人离散成n个串联的节段,每个节段由一段鞘和一段间隙组成。拉动腱时,间隙被逐渐闭合,产生弯曲。

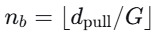
定义输入位移,可以算出完全弯曲的节段数(G是间隙长度)。每个弯曲节段的长度和角度为:

其中D是机器人直径,决定了每节的最大弯曲角(约10.2°)。
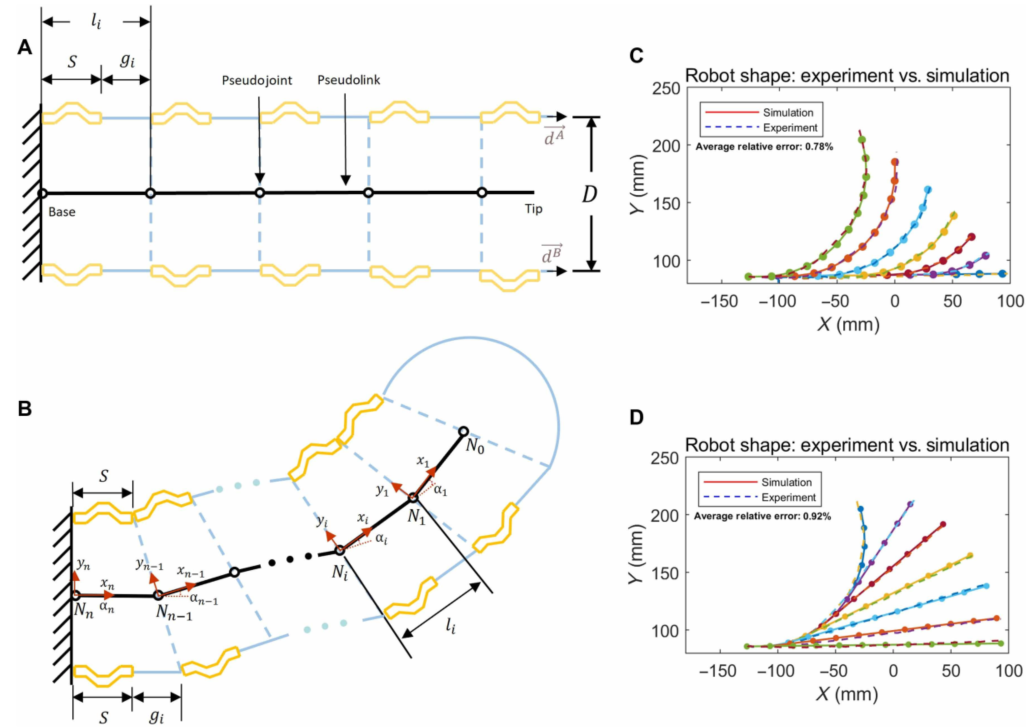
Figure 3:运动学建模和实验验证。(A)机器人身体的截面离散化。(B)当腱A被拉动时的坐标系和示例机器人配置。(C)当腱A被拉动时机器人形状(11个截面)的仿真和实验结果的比较。(D)当腱A随后被释放时的比较。
图3C-D显示,仿真预测的11节机器人形状与实验非常吻合,平均相对误差小于1%。这意味着可以用这个模型来预测和控制形状。
Movie S6:运动学模型验证
视频展示了11节机器人在拉动和释放过程中的实际形状,与仿真预测的形状进行逐帧对比。两者高度吻合,验证了运动学模型的准确性。
🗺️ 工作空间有多大?
基于运动学模型,他们用蒙特卡洛方法分析了6节机器人的工作空间。
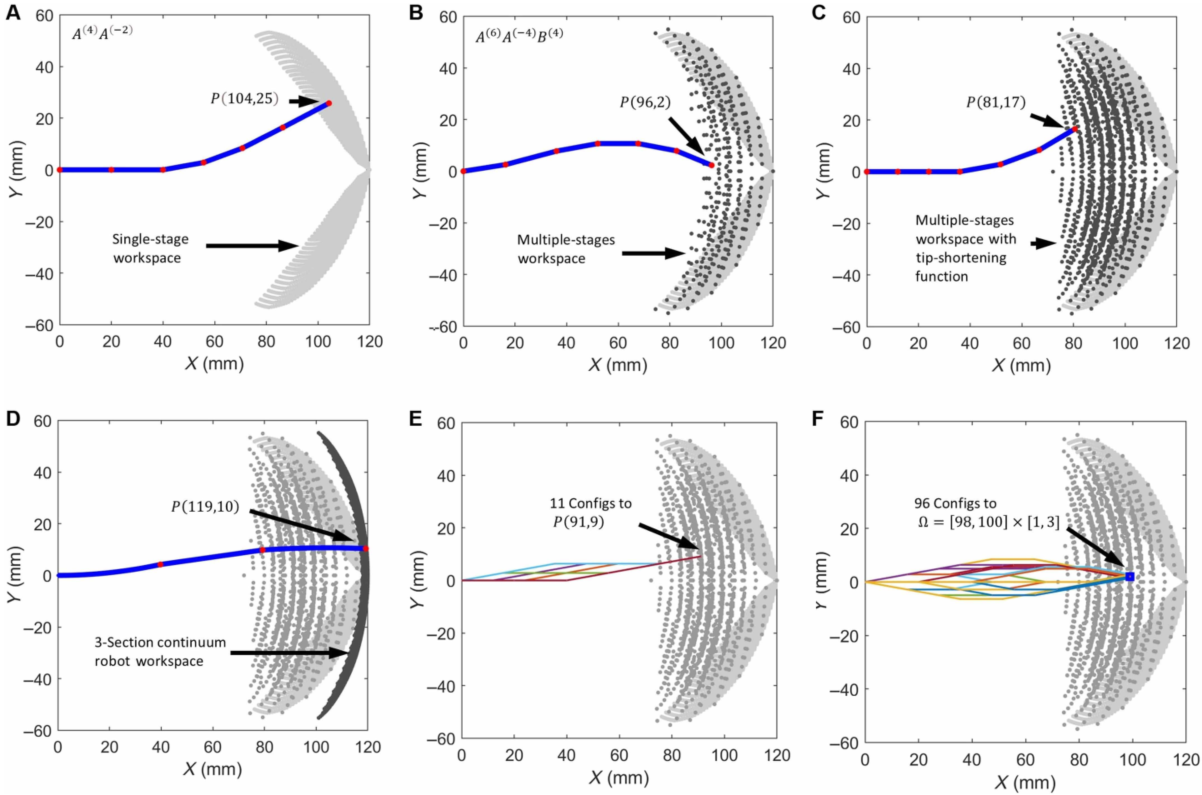
Figure 4:六节HasMorph机器人的运动工作空间扩展和各种不同构型的比较。(A)单弯曲阶段,即单肌腱拉/放循环实现的工作空间。(B)多弯曲阶段(多个拉/放循环)合并时的扩展工作空间。(C)通过允许一个截面的两个护套间隙闭合,即截面是直的,但其长度从S + G缩短到S,进一步扩大了工作空间。(D)所提出的机器人工作空间的比较(需要两个肌腱)与传统的三节肌腱驱动连续体机器人(需要六根钢筋束),突出了所提出的机器人的上级覆盖由于其多级顺序弯曲和缩短机制。使用缩短和多级弯曲策略的组合,机器人以11种不同的配置到达相同的目标位置。(F)机器人有96种不同的配置到达蓝色正方形区域Ω。
图4A是单次弯曲的工作空间(一片区域),图4B是多阶段弯曲(多次拉/放交替)的扩展空间,图4C是加上缩短功能后的进一步扩展。
关键对比:图4D显示,传统3节机器人需要6个电机才能达到的覆盖范围,这个设计只用2个电机就实现了——而且覆盖面积更大。
图4E显示,同一个目标点可以用11种不同形状到达。图4F显示,一个4平方毫米的区域,机器人可以用96种不同形状到达。这就是“少电机多形状”的实力。
🧪 实验验证:3节机器人的27种形状
他们用3节机器人(每节可弯约90°)做了完整演示。理论上,3节可以产生3³=27种不同的形状——每一节可以向左弯、向右弯、或者直着。
Figure 5:三节机器人展示的形状变形状态。为了增强每个配置的视觉清晰度,使用了三节机器人,节段长度为42、72、102和132 mm,均匀间隙长度为60 mm,每个节段在完全闭合时引起90°弯曲。(A到I)机器人展示了27种不同的配置,其中三个节段(即,3n种配置,如在“概念和设计原理”部分中所解释的)。(J至L)部分闭合和完全闭合间隙状态之间的比较。即使当差距仅部分闭合时,也可以保持所得到的配置而不需要附加的锁定机构,说明了机器人的固有稳定性和配置空间的广泛覆盖。(M)与(A)至(I)中所示配置对应的电机控制序列。完整演示请参见视频S7。


图5A-I展示了9种典型形状(对称的),图5J-L展示了部分弯曲和完全弯曲的对比。表1列出了每种形状对应的控制序列,用表示“拉A腱直到第n节弯曲”,表示“释放A腱直到第n节恢复”。
注意一个有意思的细节:同样的输入值,不同的操作顺序,可以得到完全不同的形状——这就是迟滞的威力。
Movie S2:复杂形状变化演示
视频展示了3节机器人在两个电机驱动下,通过不同的拉动和释放顺序,产生的27种不同形状。可以看到同样的输入值,不同的操作顺序得到完全不同的形状,这是迟滞机制的核心优势。
Movie S7:3节机器人的27种形状演示
视频展示了机器人通过形状变化到达目标物体,以及通过尖端缩短功能改变路径、回溯、绕开障碍物等多种操作能力。这演示了机器人在动态环境中的适应性。
🌱 集成到生长型机器人
他们把这个机制集成到了一种“尖顶外翻生长型机器人”中。这种机器人靠气压把内层薄膜向外翻,像植物生长一样延伸。
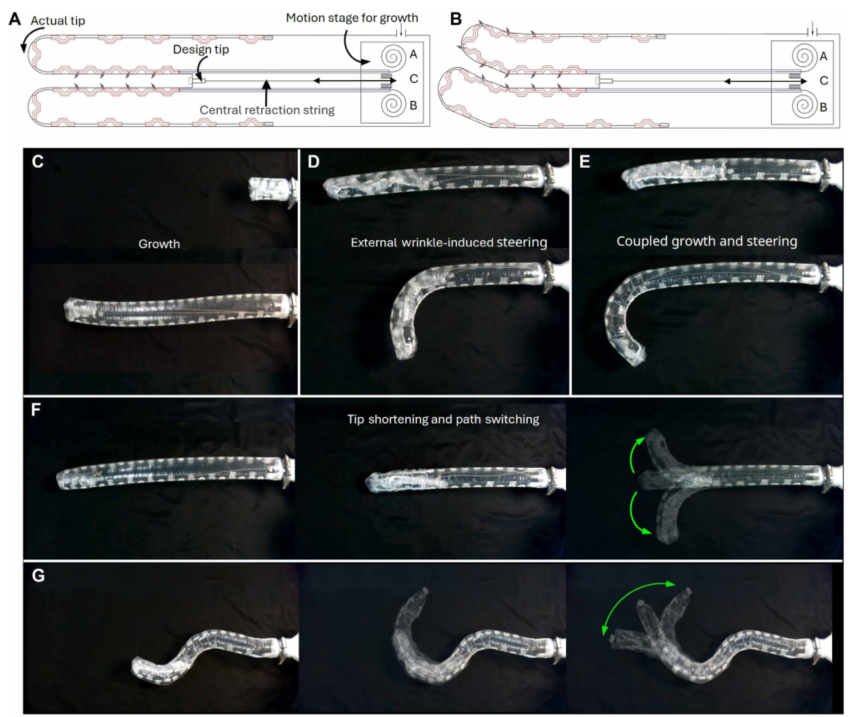
Figure 6:形状变形和尖端生长机器人。(A)将充气梁倒置以形成尖端外翻机器人。将中心缩回绳连接到尖端以控制倒置材料的释放和缩回。(B)拉动一个肌腱从设计尖端向外传播褶皱,当释放它时,皱纹会向同一方向展开。生长过程是通过高气压将内部材料向外翻转来实现的(大约2psi)。(D)在外部张力诱导转向模式中,当腱被拉动以在机器人的外部材料上产生褶皱时,机器人在尖端处弯曲,能够独立于生长过程进行弯曲。机器人在这种模式下分别转向和生长。(E)在耦合生长和转向模式下,机器人可以在其两侧释放不同长度的情况下生长。在这种模式下,机器人生长到期望的形状。(F)通过同时拉动两侧腱、闭合护套间隙并缩短机器人来实现尖端缩短,同时通过再次将机器人延伸到选定的方向来允许重定向。(G)在基部形成复杂姿态之后,机器人仍然可以在不影响基座姿态的情况下在尖端生长和弯曲。图中所示的运动模式可以在视频S3中找到。
图6展示了四种模式:
(C) 直线生长
(D) 外部褶皱弯曲(不生长)
(E) 耦合生长与弯曲
(F) 尖端缩短
这种机器人的优势在于:在复杂环境中生长时,已经形成的形状可以保持不动,只有尖端在动。图6G就展示了这一点:基部已经形成复杂形状,尖端还在继续生长和转向。
Movie S3:生长型机器人的四种运动模式
视频演示了生长型机器人的四种基本运动模式:直线生长、外部褶皱弯曲(不生长时)、耦合生长与弯曲、以及尖端缩短。展示了机器人如何在复杂环境中灵活变换运动方式。
🧭 导航演示:在障碍物中穿行
他们做了一个1.2米长的机器人,在布满障碍的狭小空间中演示了复杂导航。
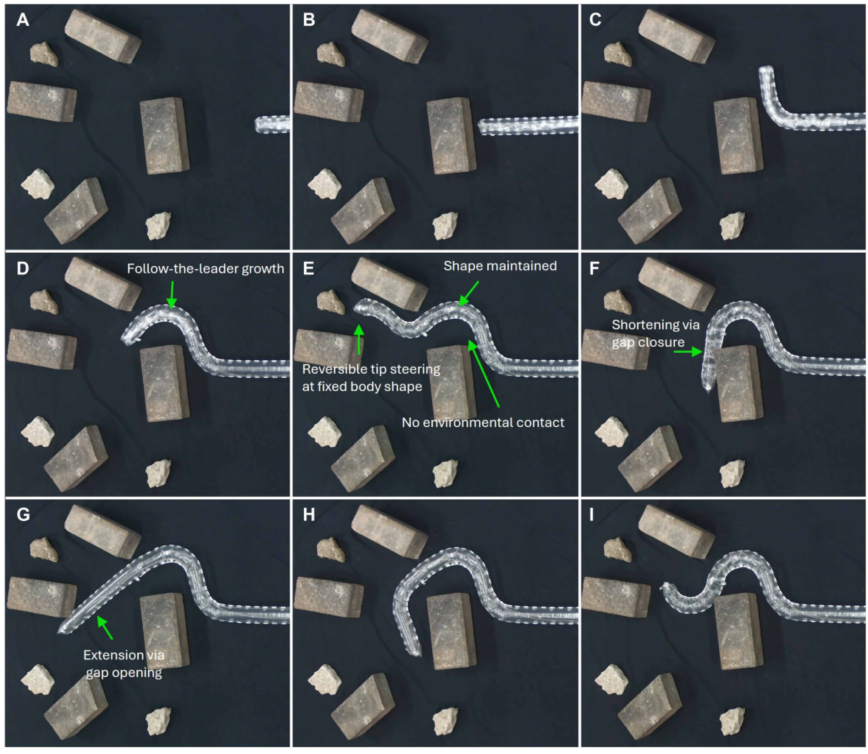
Figure 7:一个1.2米的机器人通过跟随领导者尖端增长,可逆转向和尖端缩短在混乱的环境中导航。为了在这个长度上实现形状变形操作,节段间隙增加到20 mm,并且在两个弯曲鞘段之间插入三个直鞘段作为低摩擦结构支撑。此外,护套段沿着机器人的外部布置,以促进更平滑的生长。(A)机器人以其默认配置开始。(B)机器人开始生长。(C和D)机器人通过跟随领导者生长绕过障碍物,形成“S”形。(E)机器人增长并执行可逆转向以接近目标物体,同时保持其复杂的身体形状,而不依赖于与环境的接触。(F)机器人变短以返回到障碍物另一侧的另一个分支区域。这是通过同时拉动两个肌腱来实现的。(G和H)机器人通过释放肌腱重新打开鞘间隙,继续向新的方向探索,并接近另外两个目标物体而成长。(I)基于先前形成的弯曲的释放和重建,机器人重新接近初始目标物体。视频S9中提供了相应的演示。
图7A-E展示了一个完整的导航过程:机器人生长、绕过障碍、形成S形、继续生长、到达目标。注意,这些复杂的身体形状不是预先设计的,而是机器人在导航中自适应形成的。
图7F-I展示了机器人的另一种能力:尖端缩短后回溯到分叉点,然后沿着新方向生长去探索其他目标。
整个过程中,机器人不需要与环境发生物理接触(除了必要的支撑),完全靠自身的形状变化来避开障碍。
Movie S9:1.2米机器人在复杂环境中的完整导航
视频展示了1.2米长的机器人在布满障碍的狭小空间中的完整导航过程:生长、绕过障碍、形成S形、继续生长、到达目标、尖端缩短回溯、分叉探索新方向。整个过程机器人不需要与环境发生物理接触,完全靠自身形状变化来避开障碍。
Movie S10-S11:其他补充实验
视频S10和S11展示了其他补充实验,包括不同参数配置下的性能测试等。
03 创新点① 把迟滞变成工具
迟滞在机器人学里一向是“坏东西”——导致控制误差、需要补偿。但作者故意制造迟滞,用它来产生更多的形状。这个思路的转变很有启发性:有些被归为“缺陷”的现象,换个角度看可能是资源。
② 指数级形状扩展
传统上,两个电机只能控制一根腱,产生三种状态(拉、放、停)。但这个设计里,两个电机控制n段,可以产生3ⁿ种形状。这背后的机制是:顺序弯曲+迟滞,让同一个输入序列在不同时间产生不同结果。
③ 顺序弯曲的力学实现
关键是让拉力从尖端向基部衰减。他们用一系列弯曲的鞘段来制造摩擦,参数选得刚好(θ=25°),让拉力衰减梯度刚好匹配弯曲所需的力量。这个设计简洁有效,不需要传感器反馈。
④ 生长型机器人的形状控制
生长型机器人(尖顶外翻型)有个天然问题:身体一直在变长,怎么控制形状?他们的方案是:在机器人内壁上固定鞘段,让形状变化独立于生长过程。而且已经形成的形状可以锁定,不影响后续生长。
⑤ 完整的理论框架
从摩擦模型到运动学模型,从力-位移曲线到工作空间仿真,论文提供了完整的理论支撑。图3和图5的模型验证表明,这套理论足以指导实际控制。
04 总结与展望这篇论文最有意思的地方是视角转换:当大家都在想办法消除迟滞时,他们想的是怎么利用它。这种“变废为宝”的思路在工程设计中不常见,但往往能开出新路。
从应用角度看,这个设计的优势很实在:两个电机,就能让一段长长的软体产生无数种形状。这意味着用很简单的硬件,就能实现很复杂的操作。在医疗内窥镜、管道检修、狭小空间作业这些场景里,这个特点很有价值。
未来研究将聚焦于以下几个方向:
🔸 3D空间运动:目前只做了平面内的弯曲,扩展到3D需要更复杂的腱路设计,但原理应该能推广。
🔸 逆运动学与控制:目前是开环控制,要实现精确的末端定位,需要逆运动学模型和反馈控制。
🔸 摩擦优化与长度扩展:随着节段增加,累积摩擦会线性增长,最终限制机器人长度。可以通过优化鞘段角度、使用低摩擦材料、或者混合使用直段和弯段来延长有效长度。
🔸 变刚度集成:目前刚度主要由气压决定,如果能加入变刚度机构,可以在需要时“硬”起来(比如推东西),不需要时“软”下来。
🔸 路径规划与自主导航:复杂的形状变化意味着路径规划空间很大,需要开发高效的规划算法来利用这个能力。
🔸 更高效的制造:目前是手工装配,未来可以设计成一体成型或模块化快速组装的结构。
把迟滞这个“坏事”变成好事,作者不仅做出了一个好用的机构,还给软体机器人设计提供了一种新思路:有时候,那些我们避之不及的东西,恰恰是解决问题的钥匙。
---
相关视频(见论文补充材料):
Movie S1:顺序弯曲和顺序恢复过程
Movie S2:复杂形状变化演示
Movie S3:生长型机器人的四种运动模式
Movie S4:完整的驱动过程(输入信号、张力、气压变化)
Movie S5:直鞘段(随机弯曲)与弯鞘段(顺序弯曲)对比
Movie S6:运动学模型验证
Movie S7:3节机器人的27种形状演示
Movie S8:形状变化与尖端缩短能力
Movie S9:1.2米机器人在复杂环境中的完整导航过程
Movie S10-S11:其他补充实验
未来研究将聚焦于以下几个方向: